Inverse Kinematics - IK Animation
Friday, November 6th, 2009
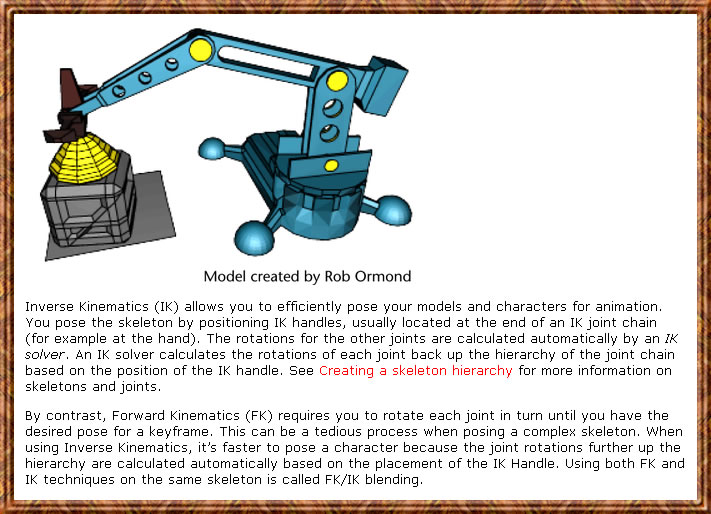
- The goal of this lesson is to animate a mechanical arm so that it extends into a position over a cargo box, picks up and moves the cargo box to another location, and then sets it down.
- The MechArm.mov published movie of the animation you will learn and do with this tutorial.
- The .html HTML version of - Lesson 5 - Inverse Kinematics - Autodesk Maya tutorial
- Pages 262-302 of the PDF - Lesson 5 -Inverse Kinematics - Autodesk Maya tutorial.
- Humor for the day is worth a repeated say: "Set the IK Handle Settings: Current Solver - ikSCsolver". SC is a TLA for Single Chain. TLA is a Three Letter Acronym for Two Letter Acronym.
- Constraining an IK System is the 9th "chapter" of the Lesson 5: Inverse Kinematics. We finished that chapter during the Friday StudioIT lab class. We applied a point constraint and an orient constraint.
- Limiting the range of motion of an IK system is the 10th "chapter" of Lesson 5: Inverse Kinematics. We just got started on that chapter and will continue there on Monday, November 9th and finish up the lesson's concepts and techniques. We locked translations of the Arm Control and we locked rotations of the Swivel Base, but we did NOT get to the limiting the translations of the arm control so the mechanical arm can't extend to fully straightened.